Le P-Guard possède une capacité de télé-opération sécurisée et manuelle via joystick. Concernant sa programmation autonome, il suffit de placer des waypoints GPS sur une carte interactive pour qu’il réalise ce parcours. La ronde est ensuite enregistrée et pourra être réalisée autant de fois que vous le souhaitez de manière fiable et répétable. En cas de levée de doutes, le robot de surveillance passera par le chemin le plus rapide, à une vitesse allant jusqu’à 12 km/h.
Personnalisation des missions
Les missions du robot P-Guard sont totalement personnalisables. A vous de choisir quel chemin il est préférable d’emprunter pour une surveillance optimale de votre site. Pour chaque mission, il est possible de définir et régler de nombreux paramètres. Exemple : orienter la tourelle panoramique, modifier les vitesses, etc. Vous pouvez aussi demander au robot rondier de s’arrêter à un endroit précis pour le surveiller (planque). Il existe un mode “planque aléatoire”, qui quadrille aléatoirement le terrain.
Ronde extérieure personnalisée
Interface PGMS
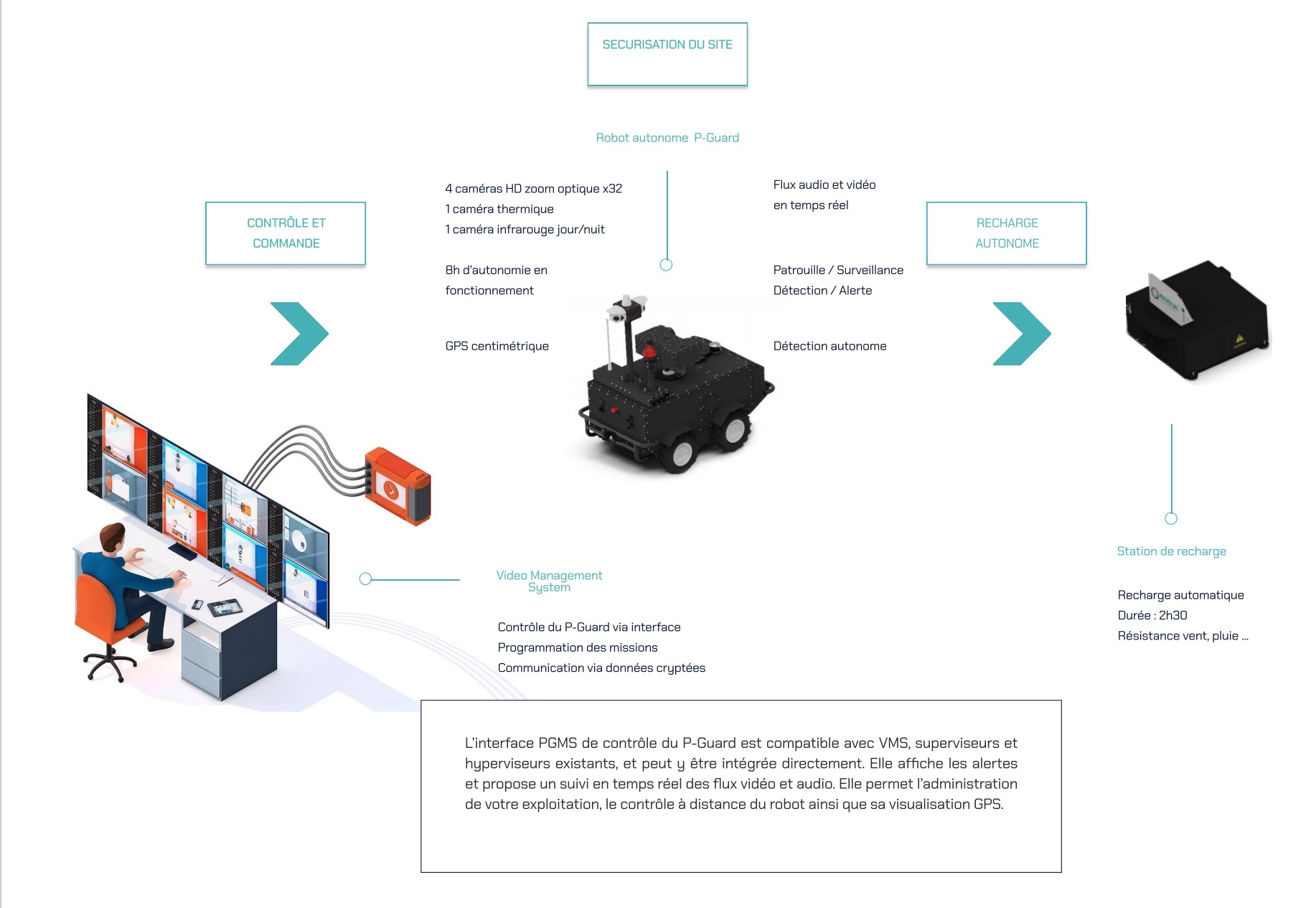
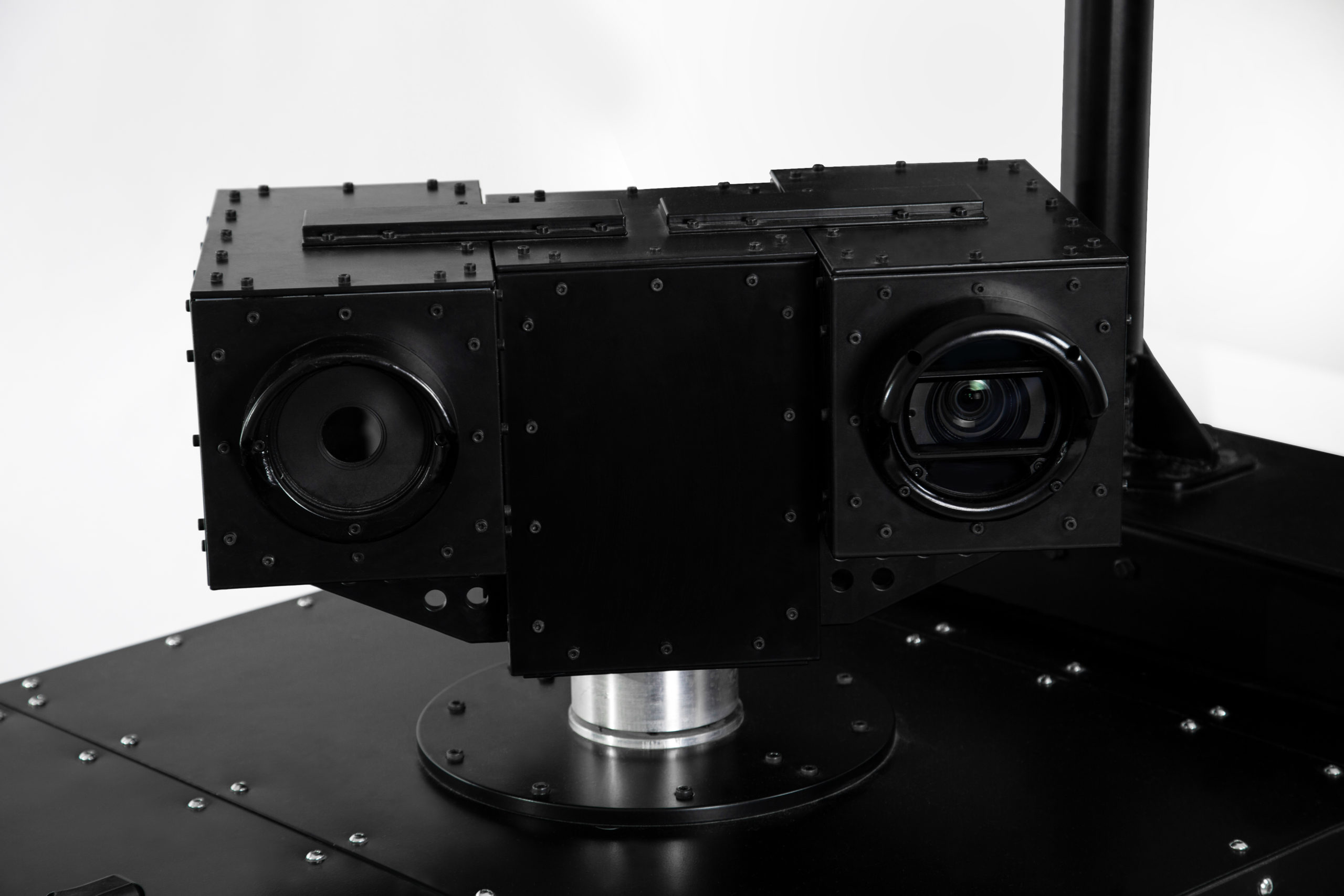
Flux audio et vidéo
Vous avez accès au flux des 6 caméras et du micro. L’IA du robot lui permet d’afficher et d’analyser les images qu’il reçoit. Il peut ainsi détecter de manière autonome toute intrusion ou anomalie. Selon la demande, différentes possibilités existent quant à l’enregistrement des flux vidéos (permanent, sur évènement, …). Suite à la détection d’une intrusion, vous pourrez télé-interpeller l’individu et avoir un dialogue à distance. Vous pouvez aussi lancer un message d’interpellation ou tout autre son pré-enregistré.
En résumé, l'interface PGMS est une IHM permettant :